Featured Projects
Autonomous Exploration and Detection in an Unknown Environment with a Quadruped Robot (Unitree Go1)
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Vision-based Autonomous Control of a 7 DOF Franka Emika Robot Arm
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
All Projects
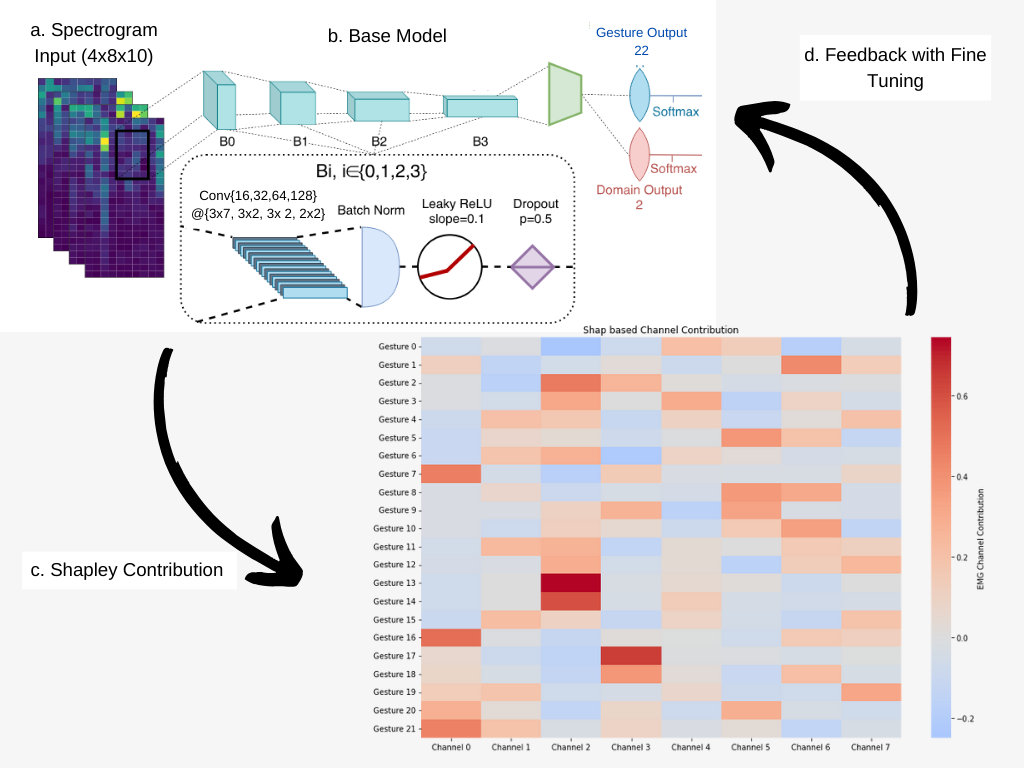
Explainable AI for Hand Gesture Recognition
Explainable AI to classify hand gestures from sEMG signals using shapley values and transfer learning.
Interactive Sketching using OpenCV and Python
A virtual canvas to draw, sketch and manipulate shapes using OpenCv and Mediapipe
Autonomous Exploration and Detection in an Unknown Environment with a Quadruped Robot (Unitree Go1)
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
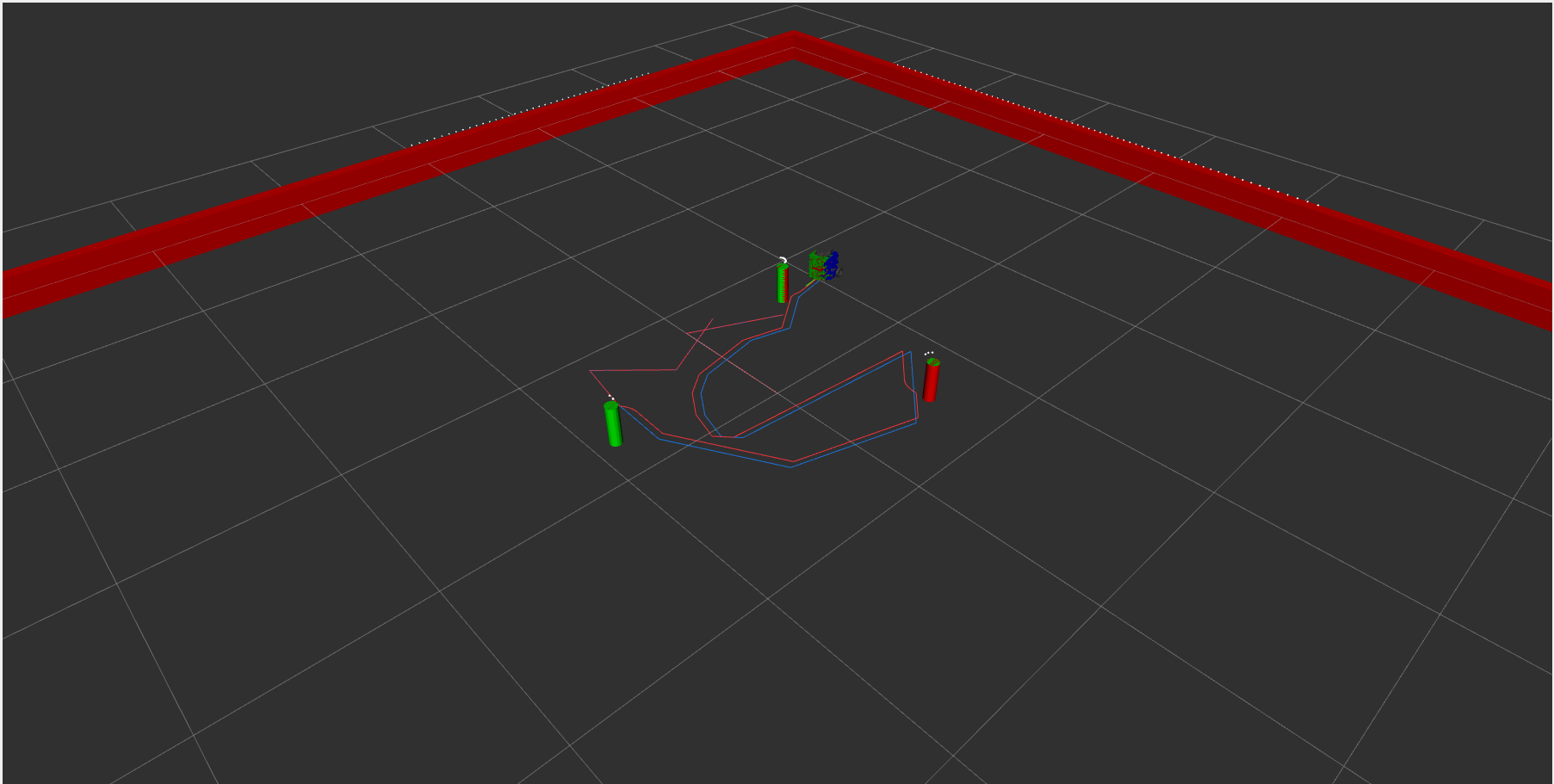
Simultaneous Localization and Mapping from Scratch (EKF SLAM)
Implemented an EKF SLAM algorithm from scratch using C++ and ROS 2 for a turtlebot3 robot. A simulation environment was developed in Rviz2 to test the algorithm.
Vision-based Autonomous Control of a 7 DOF Franka Emika Robot Arm
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.