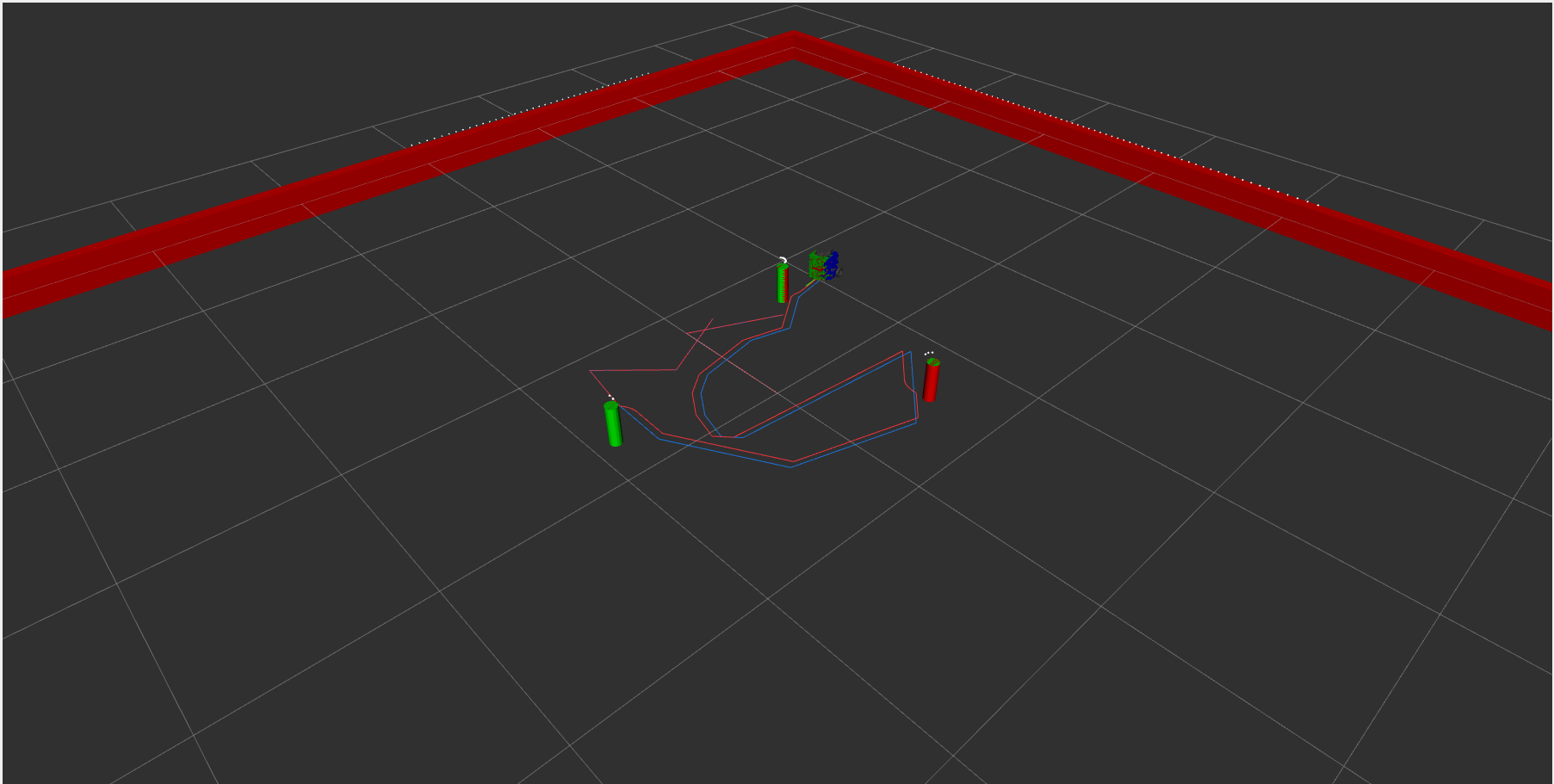
Implemented an EKF SLAM algorithm from scratch using C++ and ROS 2 for a turtlebot3 robot. A simulation environment was developed in Rviz2 to test the algorithm.
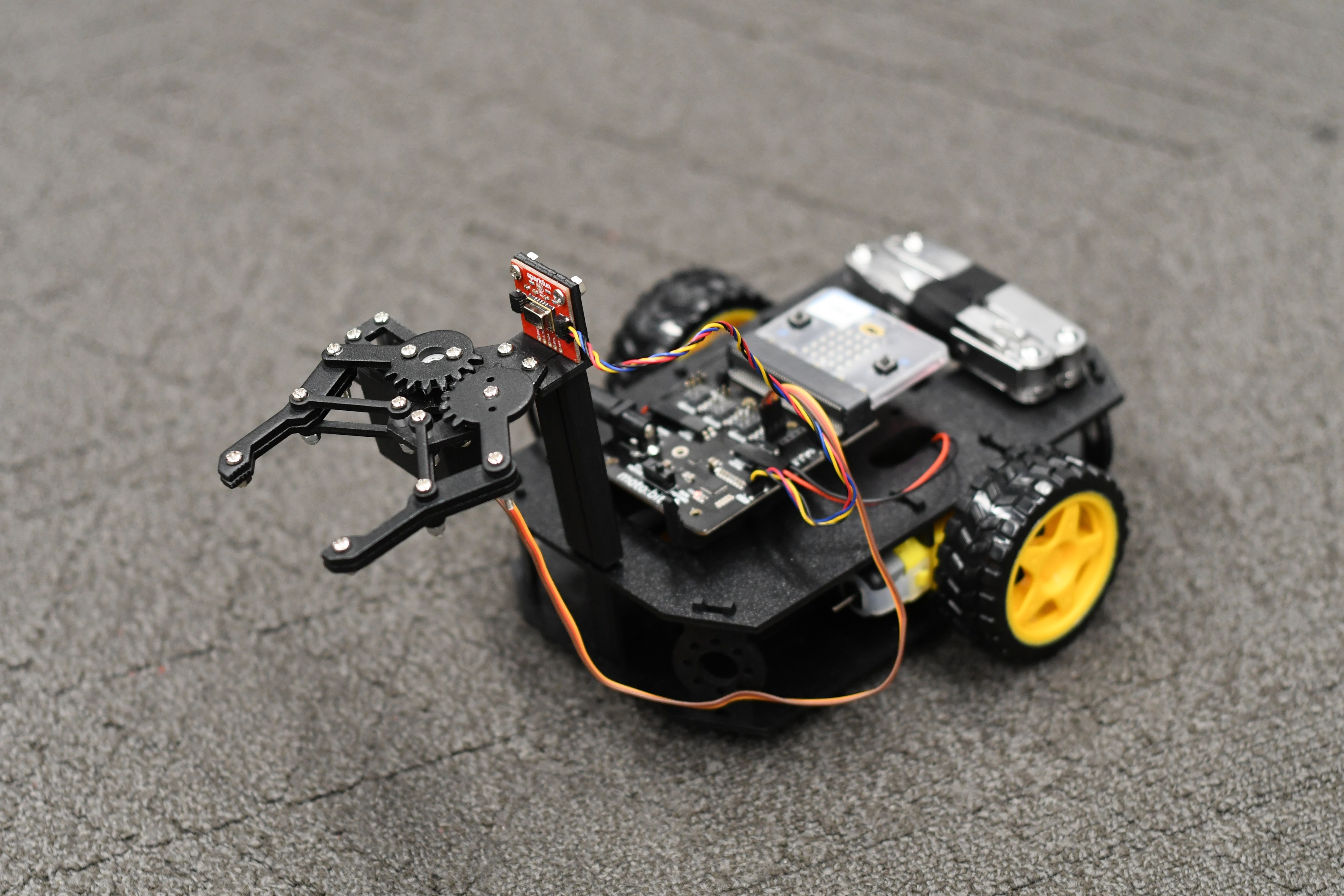
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor