Category Computer Vision
A virtual canvas to draw, sketch and manipulate shapes using OpenCv and Mediapipe
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
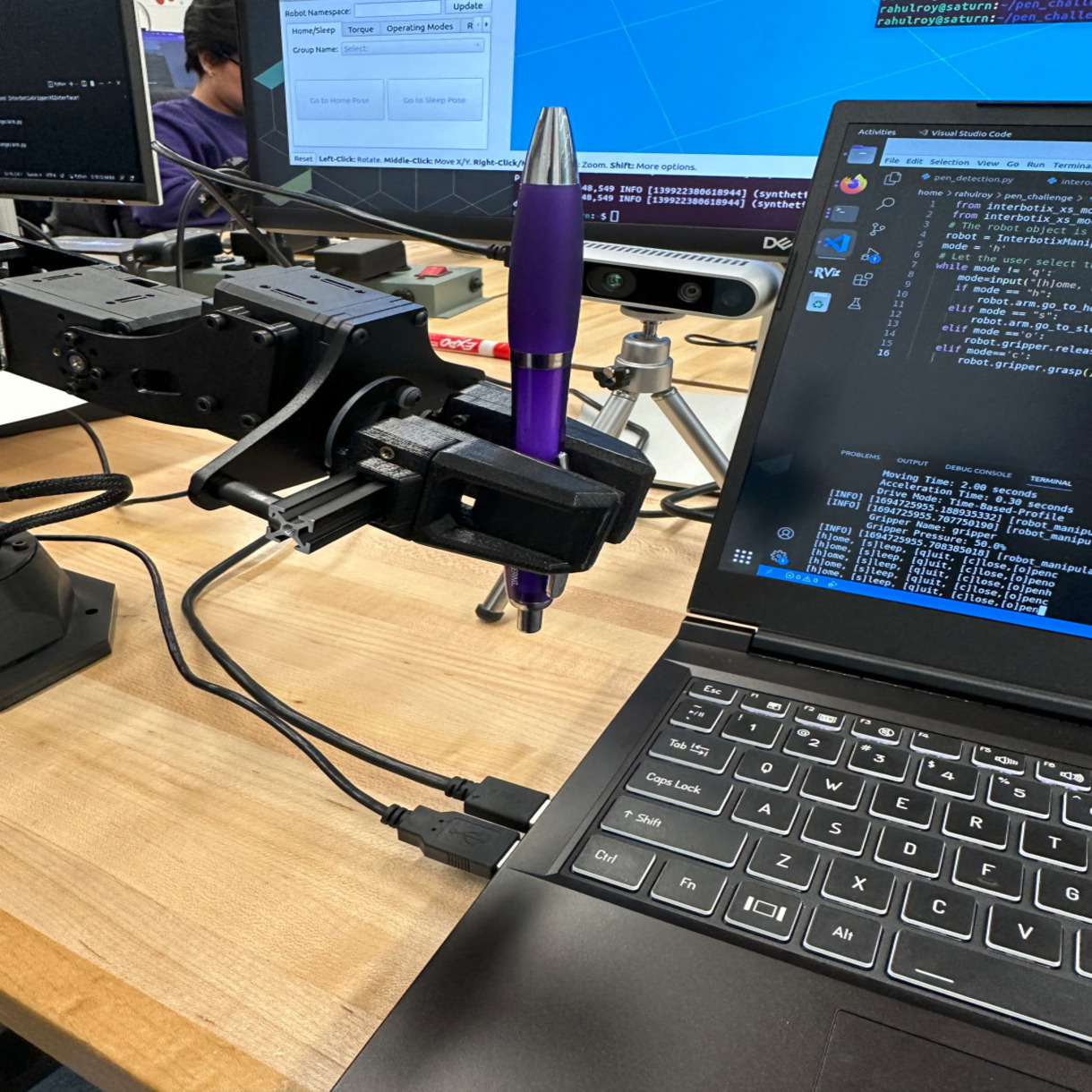
Programmed a Pincher X100 4-DOF robot arm in Python to grasp a purple colored pen.
Category OpenCV
A virtual canvas to draw, sketch and manipulate shapes using OpenCv and Mediapipe
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Programmed a Pincher X100 4-DOF robot arm in Python to grasp a purple colored pen.
Category Python
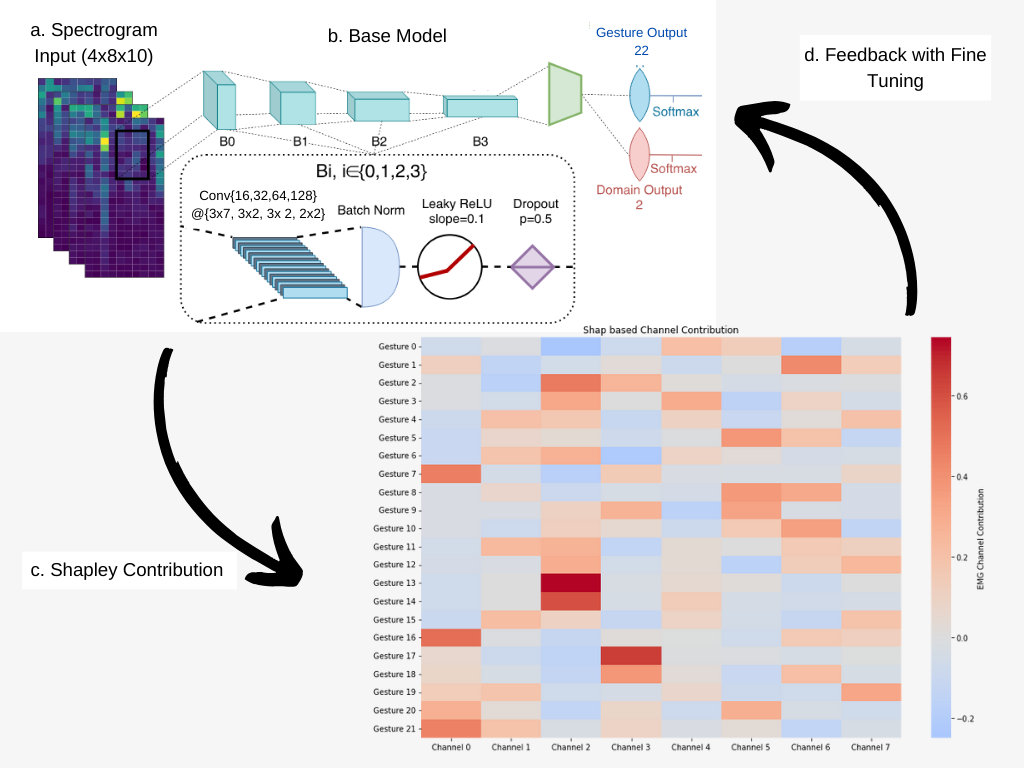
Explainable AI to classify hand gestures from sEMG signals using shapley values and transfer learning.
A virtual canvas to draw, sketch and manipulate shapes using OpenCv and Mediapipe
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Programmed path planning algorithms including Probabilistic roadmap with obstacles, Rapidly-exploring Random Tree and Rapidly-exploring Random Tree with obstacles in Python and ROS 2.
Programmed a Pincher X100 4-DOF robot arm in Python to grasp a purple colored pen.
Category PincherX 100
Programmed a Pincher X100 4-DOF robot arm in Python to grasp a purple colored pen.
Category Intel RealSense
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Programmed a Pincher X100 4-DOF robot arm in Python to grasp a purple colored pen.
Category Mobile Manipulation
Category CoppeliaSim
Category PID Control
Category C
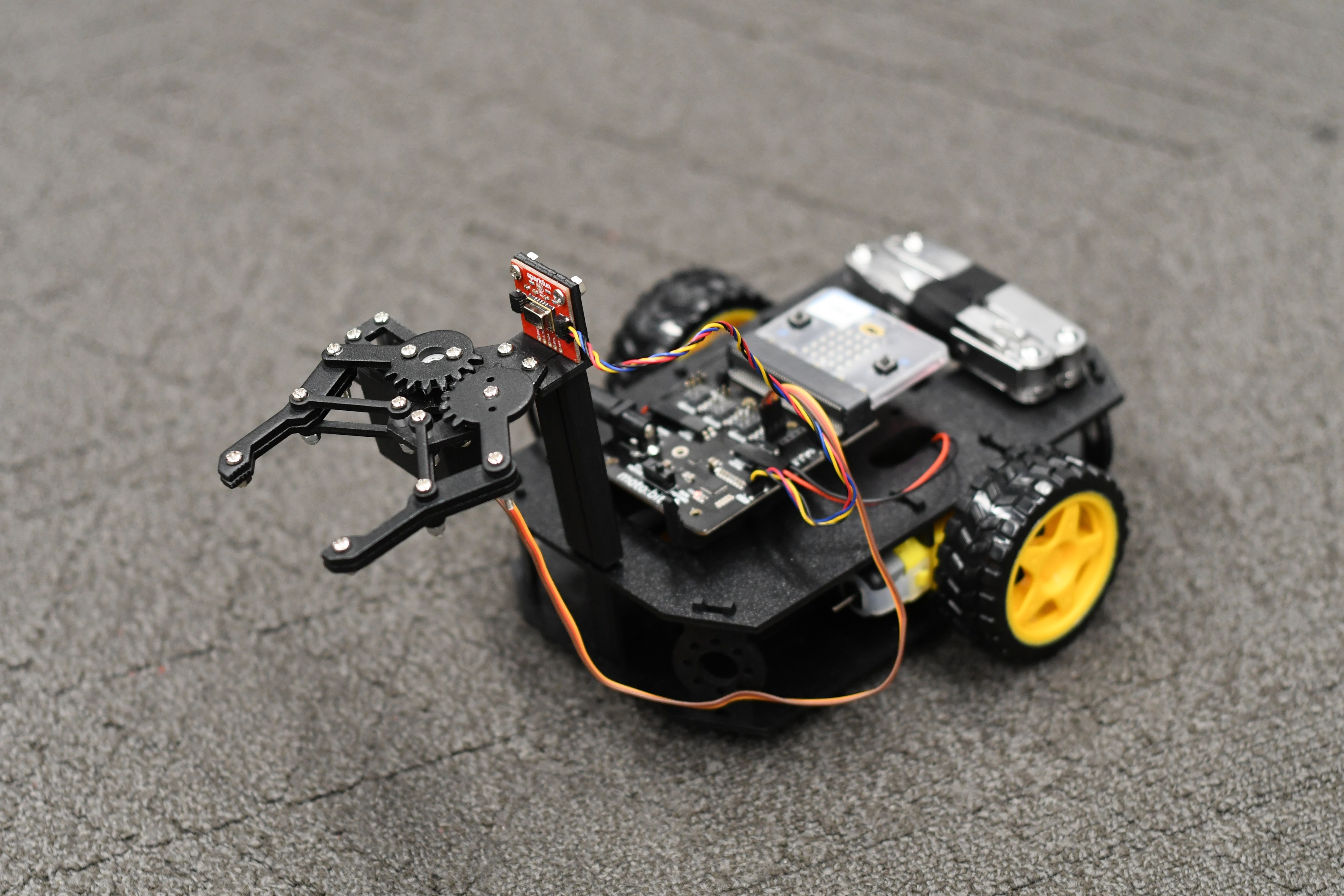
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor
Category Mechatronics
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor
Category Embedded Systems
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor
Category I2C
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor
Category nRF52833
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor
Category PWM
Programmed a nRF52833 microcontroller in C to control a differential drive car and autonomously operate a gripper on detection of objects using an IR sensor
Category ROS2
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Category Motion Planning
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Category MoveIt
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Category Franka Emika Robot Arm
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Category YOLOv8
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Programmed a 7 DOF Franka Emika Robot Arm in ROS 2 and Python to detect and knock down colored bowling pins.
Category Machine Learning
Explainable AI to classify hand gestures from sEMG signals using shapley values and transfer learning.
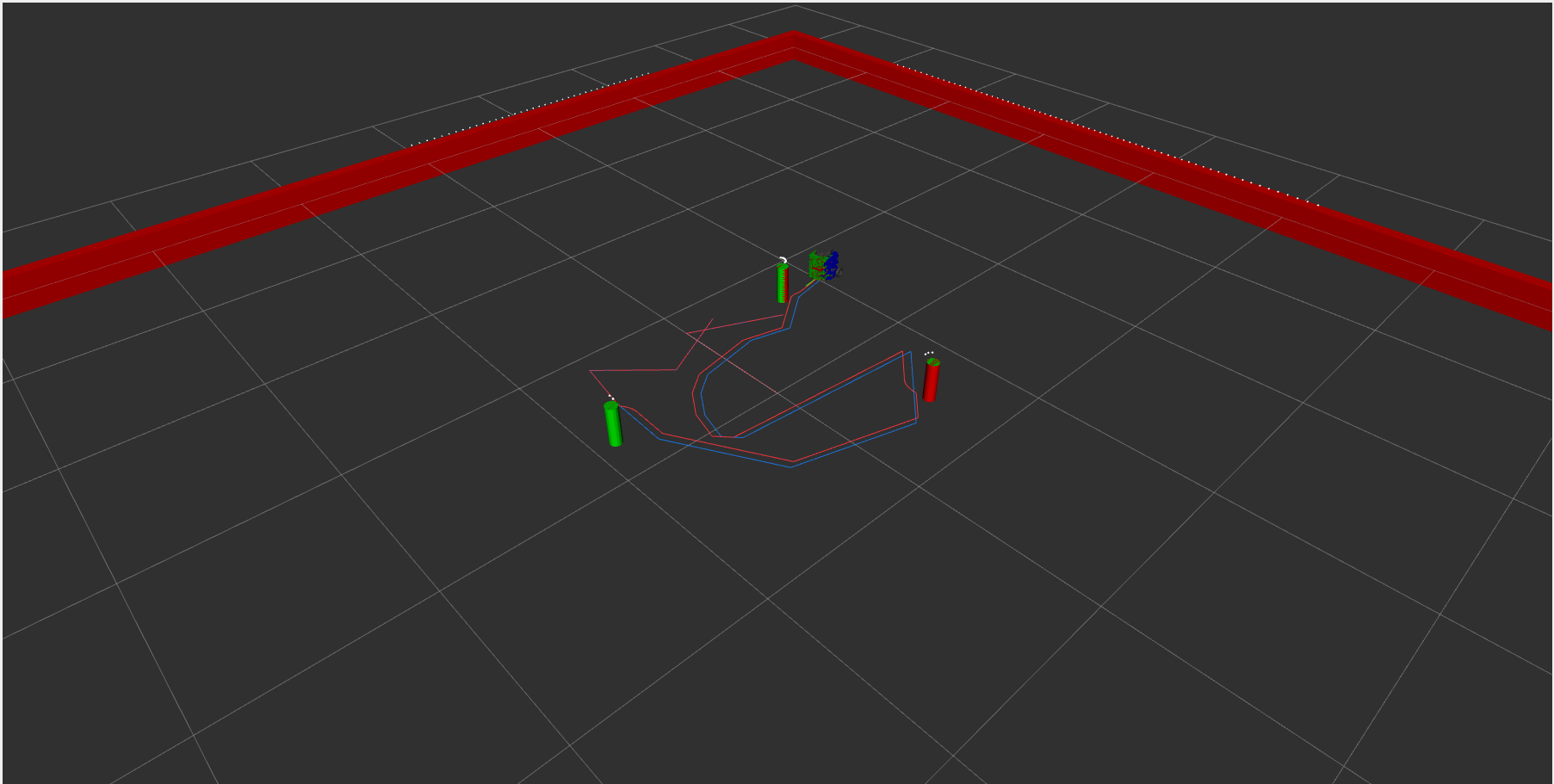
Implemented an EKF SLAM algorithm from scratch using C++ and ROS 2 for a turtlebot3 robot. A simulation environment was developed in Rviz2 to test the algorithm.
Category ROS 2
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Implemented an EKF SLAM algorithm from scratch using C++ and ROS 2 for a turtlebot3 robot. A simulation environment was developed in Rviz2 to test the algorithm.
Category C++
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Implemented an EKF SLAM algorithm from scratch using C++ and ROS 2 for a turtlebot3 robot. A simulation environment was developed in Rviz2 to test the algorithm.
Category EKF SLAM
Implemented an EKF SLAM algorithm from scratch using C++ and ROS 2 for a turtlebot3 robot. A simulation environment was developed in Rviz2 to test the algorithm.
Category Deep learning
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category 3D SLAM
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category RTAB-Map
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category Unitree Go1
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category Frontier Exploration
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category Object Detection
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category Facial Recognition
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
Category DeepFace
Programmed a Unitree Go1 robot for autonomous exploration and human detection in an unknown environment using C++, Python, ROS 2, and 3D SLAM.
A virtual canvas to draw, sketch and manipulate shapes using OpenCv and Mediapipe
Category Deep Learning
Explainable AI to classify hand gestures from sEMG signals using shapley values and transfer learning.
Category Explainable AI
Explainable AI to classify hand gestures from sEMG signals using shapley values and transfer learning.